Hitachi Construction Machinery - ICT Construction
ICTショベル


2D・3Dシステムを活用したICTショベル
概要
衛星からの位置情報をもとに掘削面を認識する3Dシステム、またはオペレータが基準を設定する2Dシステムのいずれかを用いることで、丁張のない環境下でも掘削をアシストします

特長
マシンコントロール
位置情報からの衛星情報をもとに掘削面を認識する3Dシステム、またはオペレータが基準を設定する2Dシステムのいずれかを用いることで、オペレータの技量に左右されることなく安定した品質を実現します

3Dシステム
- 3D設計データ必要
- 丁張り大幅削減

2Dシステム
- 3D設計データ不要
- 丁張りを利用
自動停止制御【UPGRADE】
バケットが目標面に近づくと、自動的にブームを停止。
ブーム下げ自動制御(7型のみ)
バケットが目標面に追従しているときにブーム下げ動作を自動制御。 オペレータは、アーム操作のみで足元まで掘削可能です。
アーム速度制御
2種類の掘削モード ( 粗掘削 / 仕上げ ) により、目標面での掘削速度を自動調整。仕上げモードでは、アームレバーを微操作することなく精度の高い掘削が可能です。
掘削力制御(7型のみ)
バケットが目標面に追従しているときに、掘削反力による機体の浮上がりを自動制御。硬い土壌でもレバー操作を微調整することなく、高精度で力強い掘削ができます。

目標面追従制御
【UPGRADE】
バケットが目標面に追従するようにブームを制御。新開発の油圧制御により、アーム操作のみで熟練オペレータ並みの掘削を実現します。

バケット角度保持制御
【UPGRADE】
モード選択により、目標面の近くでバケット角度を保持するように制御。新開発の制御方式により、アーム操作のみでつめ跡を残さない綺麗な仕上げを実現できます。

マルチポイント制御
目標面に最も近い点でバケットを制御。 バケットが目標面に正対していなくても掘り過ぎを防止します。
エリアコントロール(7型のみ) NETIS 登録技術 (KT-210004-A)
狭所や障害物のある現場で、予め機械が動かせるエリアをモニタ上で設定できます。フロント、旋回動作時に設定した境界に近づくにつれ、スピードを減速し、オペレータの作業を支援する機能です。設定できるエリアは次の3種を用意しています。
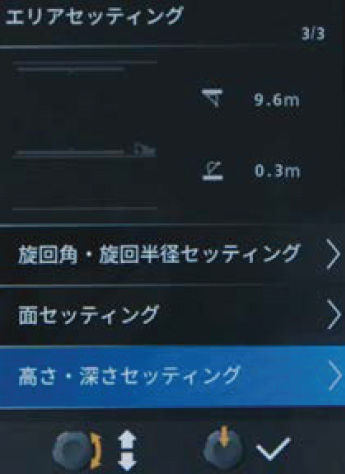
高さ・深さセッティング画面

<高さ・深さ>
高さ・深さ方向を設定し、電線や地面の配管への接触低減に。
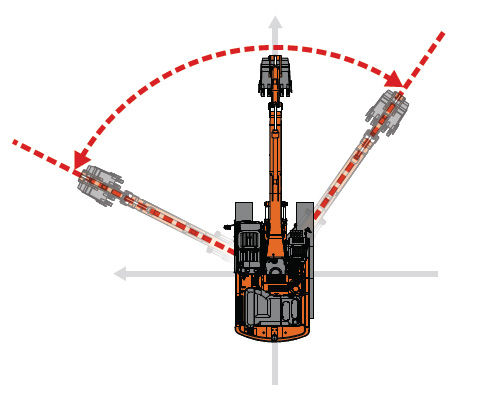
<旋回角・旋回半径>
旋回角・旋回半径を設定し、掘削・ダンプ積込位置の目安に。
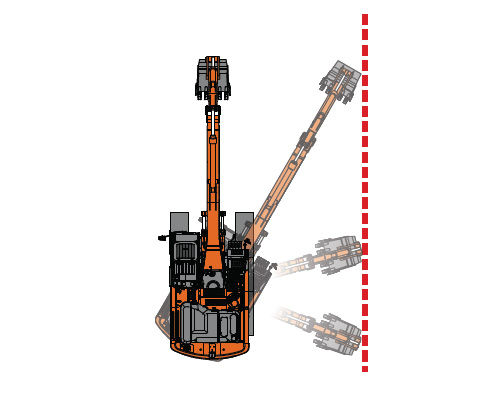
<面>
面を設定し、壁際や公道へのはみ出しの予防に。
AERIAL ANGLE
安全に作業することは、プロジェクトを成功させるため最も重視することです。潜在的な危険からお客様や作業者を守るために、ZAXIS-7 シリーズは機体周囲の優れた映像を提供します。キャブのモニタでは、AERIAL ANGLE® カメラシステムを使用した270 度の俯瞰映像が確認できます。俯瞰映像と左右後方の各カメラの映像の組み合わせによる4 つの表示パターンからお好みの映像を選択できます。さらに、Solution Linkage Work Viewer を活用することで、機体から離れた場所で施工状況の共有化が図れ、生産性の向上に貢献します。

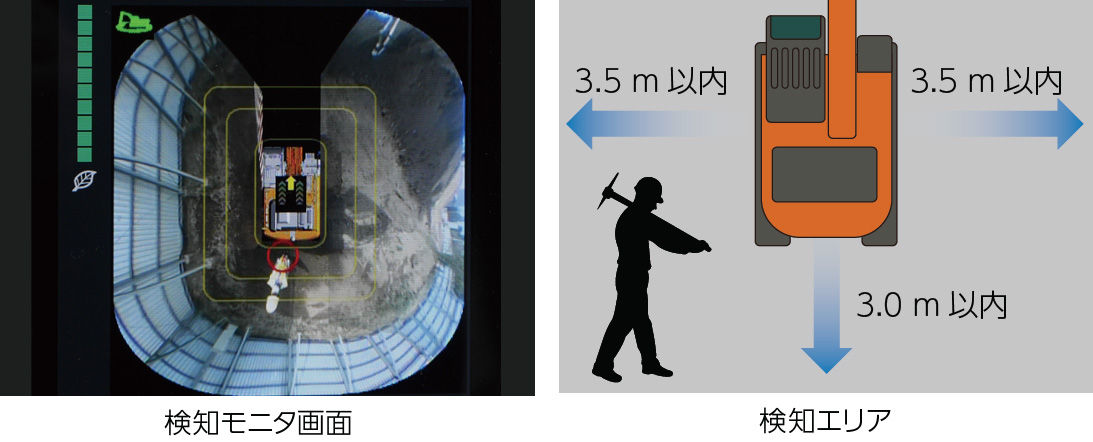
ステーショナリーモード機能
操作開始前に機械の検知エリアに侵入した人や物などの移動体を認識し、警報ブザーと共にモニタ上に○マークを表示させ、オペレータに注意を喚起します。
Solution Linkage Work Viewer(7型のみ)
スマートフォンから、現在と過去の稼働状況の映像を見ることができ、施工過程の把握にも役立てられます。
本システムは、キャブ前方に装着したフロントカメラ映像と標準のAERIAL ANGLE® の映像を用いることで、360°の周囲映像を記録することができます。

車体の近くでスマートフォンと車載端末をWi-Fi®で接続して使用
(Wi-Fi接続可能範囲で利用可能)
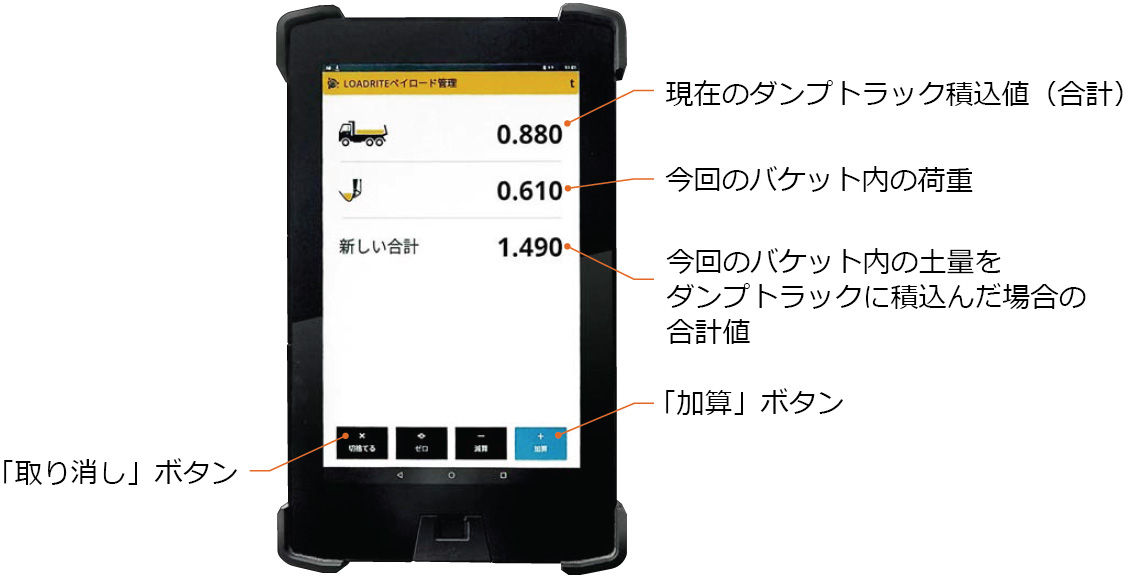
荷重判定装置ペイロードチェッカー(7型のみ)
荷重判定装置 ペイロードチェッカーをZAXIS200Xに標準装備しました。
オペレータは積込作業をしながら、ダンプトラックに積み込んだ荷重を把握でき、過積載・過少積載などの予防に役立てられます。
自動加算測定
一定時間が経過すると、バケット内の荷重を自動的にダンプトラックの積込値に「加算」 する機能です。 積込みのたびにボタンを操作する必要がないため、操作に集中できます。
手動加算測定
バケットで土砂をすくう都度、荷重をモニタ画面で確認し、「加算」ボタンを押すことで、 ダンプトラックの積込値に「加算」する機能です。 1回ごとに確認を行うことで、確実な操作を行いたい方向けの機能です。
機種


